
Block Caving
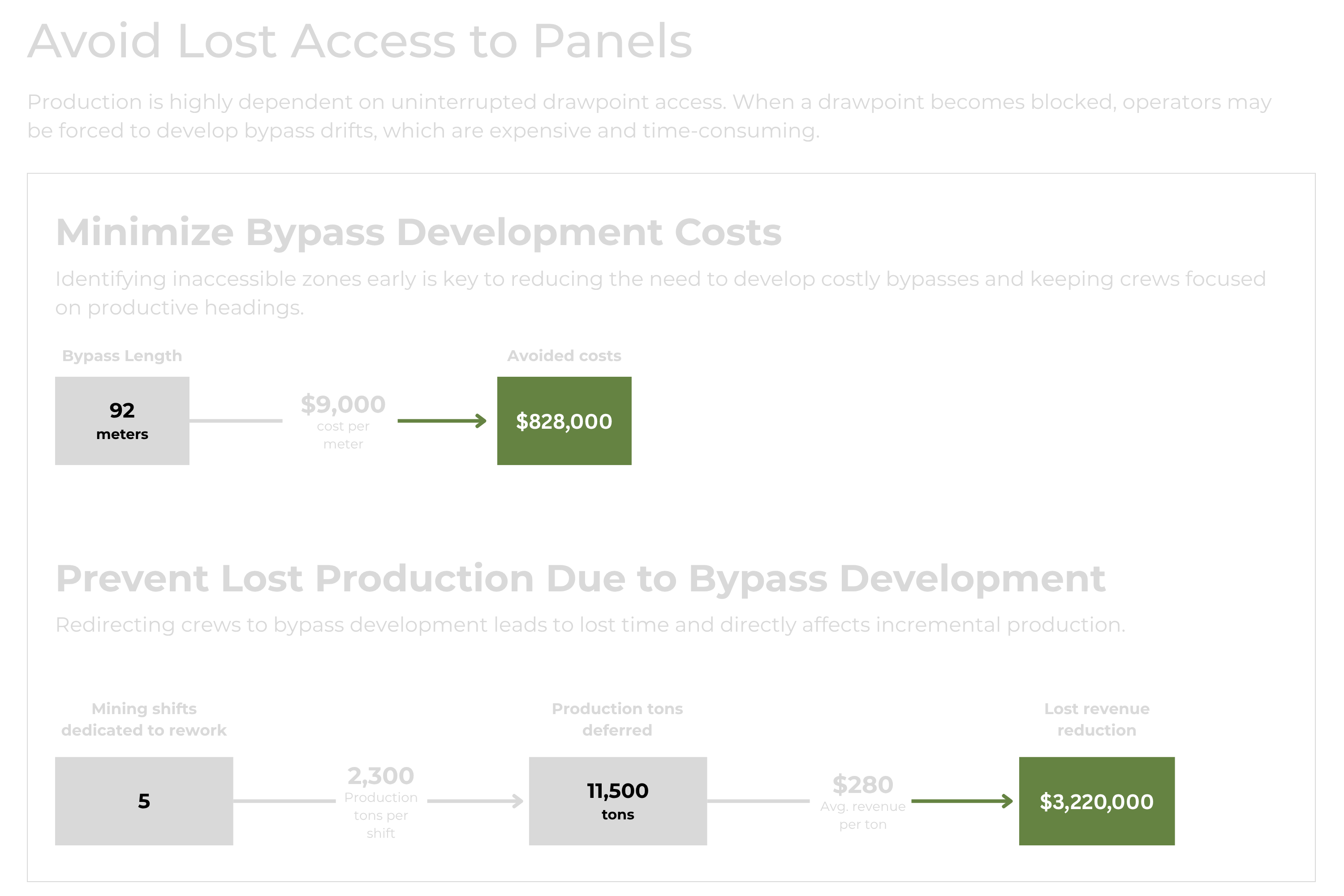
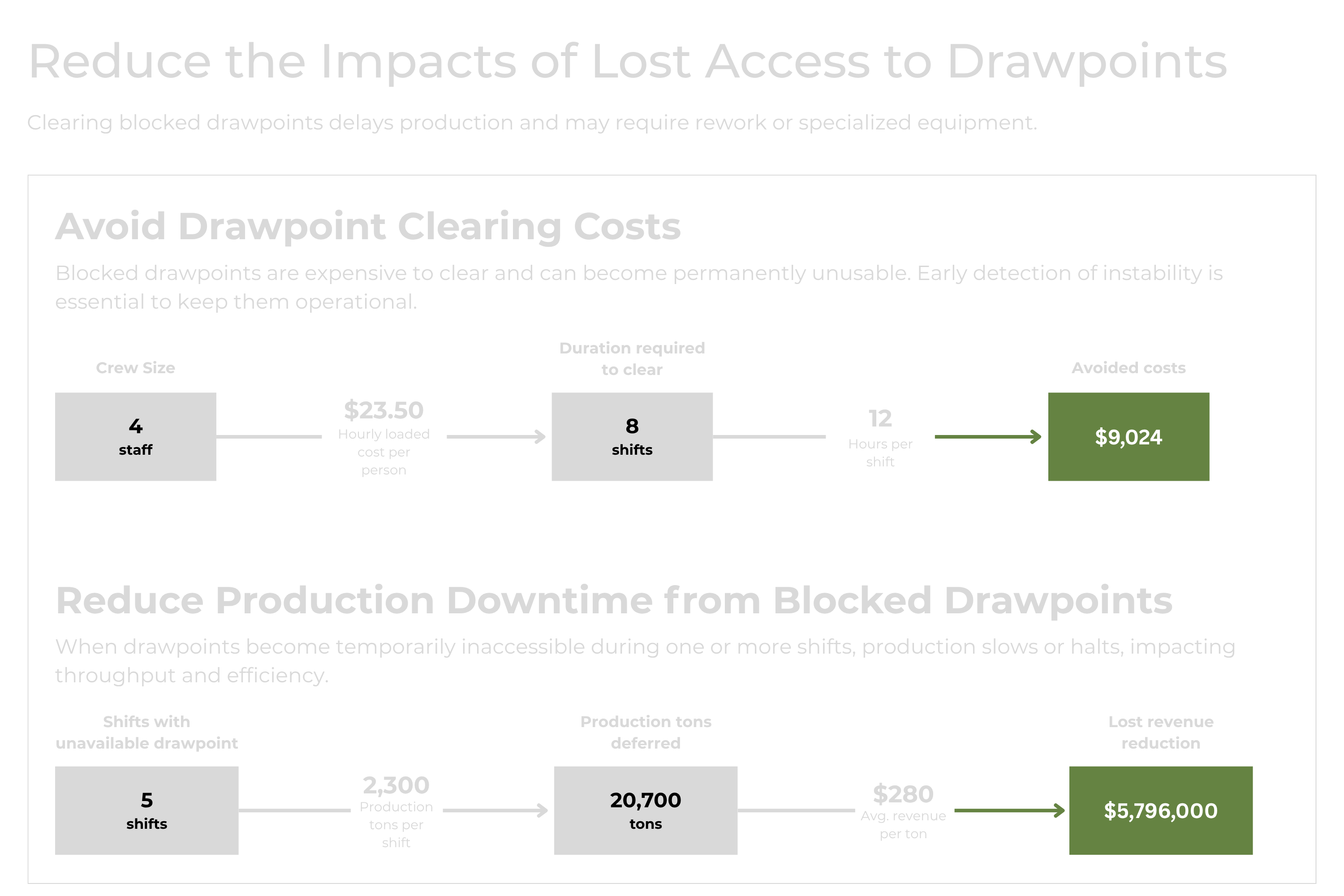
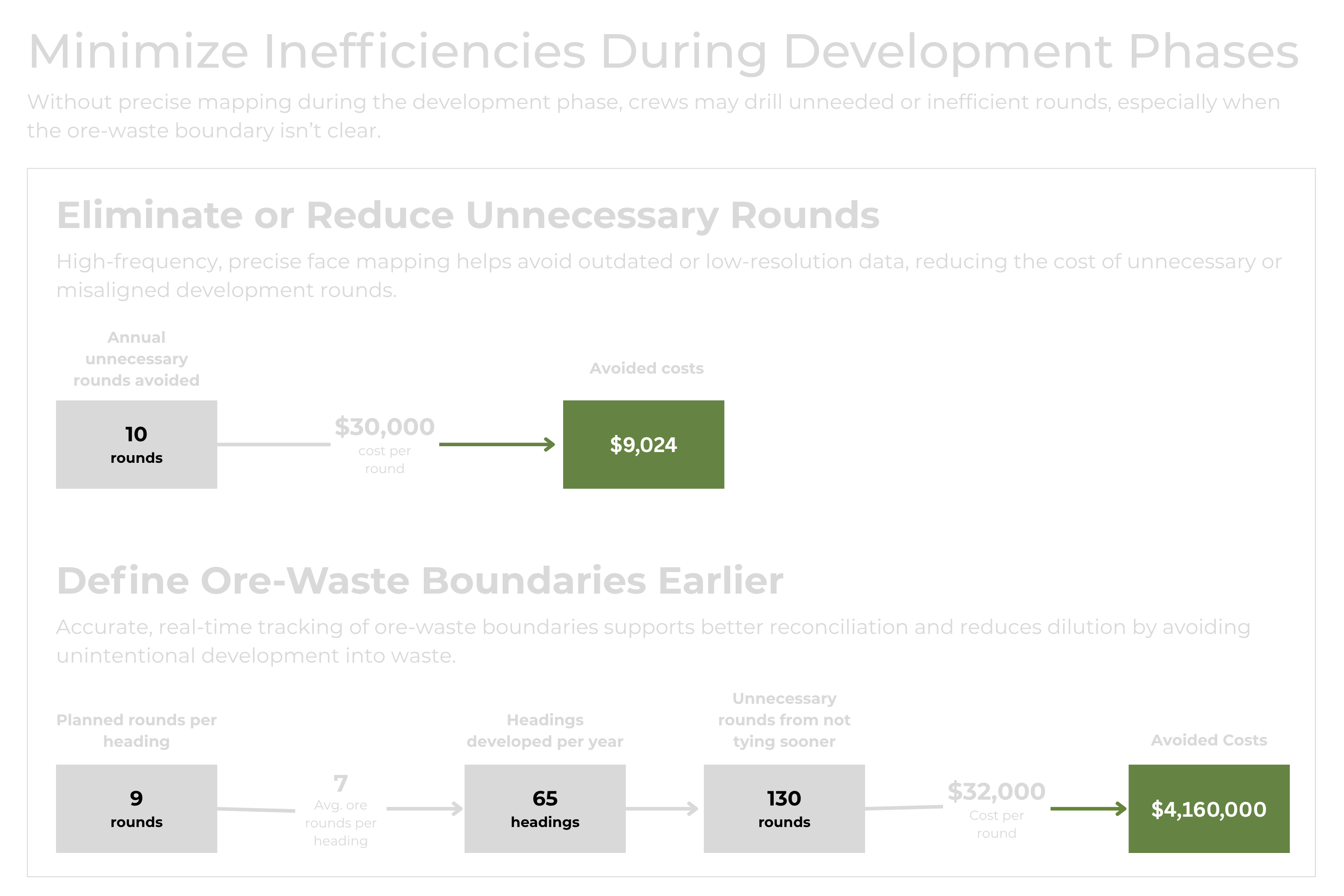
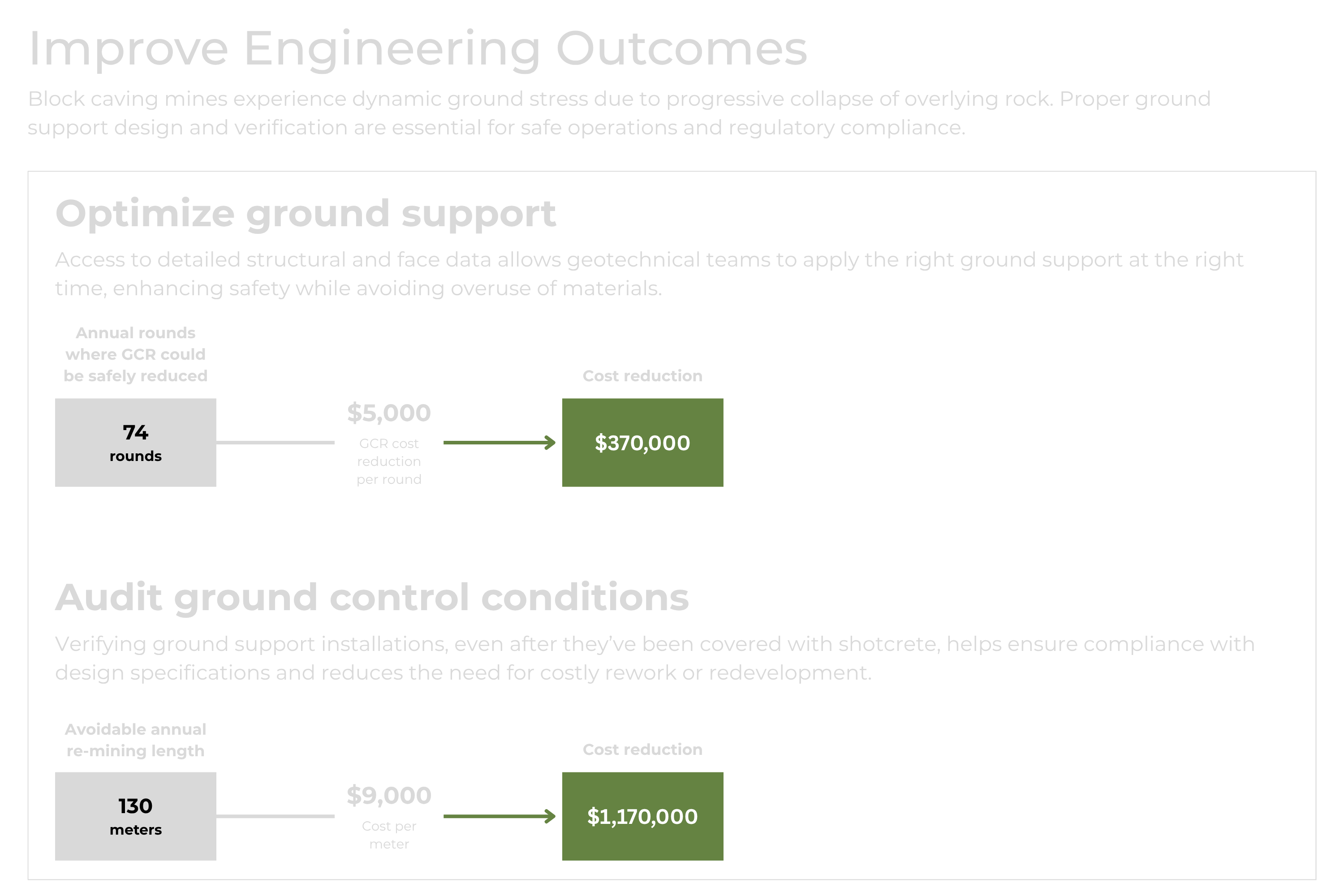
Limit costly bypass creation and drawpoint clearing delays, reduce unnecessary rounds, and improves ground control audits—boosting safety, avoiding lost production, and optimizing caving efficiency.
FAQs
Here is some helpful information about Mine Vision Systems and FaceCapture.
FaceCapture is a sensor fusion solution designed for underground mining that combines spatial, 3D image and real-time location data for geologists, mining engineers, and surveyors making critical decisions to maximize mine output. FaceCapture is used in the mining of critical minerals and precious metals. FaceCapture creates an accurate, precisely positioned digital representation of a mine face, ribs and backs in near real time using edge computing and requiring no post processing.
We are enabling the safe, productive and efficient extraction of critical minerals and precious metals in underground mines at a time when ore grades are declining, geopolitical and supply chain concerns are rising, and where “dirty and dangerous” mines fail to attract investment. The shift to underground will happen with or without us. We enhance the success and viability of these efforts. Before digging, mine operators perform a resource estimation & feasibility analysis with rock samples from drill holes. Once mining production begins, the initial plan is regularly updated with observations and data. Today, “regular updates” are often only once per month and “observations and data” are imprecise and cumbersome & dangerous to obtain.
MVS shifts “regular updates” to daily and near real time. MVS shifts “imprecise and cumbersome” to precise and frictionless. Even in the best “as-is” implementation, multiple critical production decisions are made each month based on aggregate feedback of the collective results of the prior month’s production. According to an executive at one MVS customer, “The grade control models are trued-up at the end of the month using mill grade results as the source of truth and spreading like peanut butter the variance across the advances that were done that month. This is very imprecise accounting for the ore and provides no insight into which areas were richer than others, limiting insight into future mine planning.”
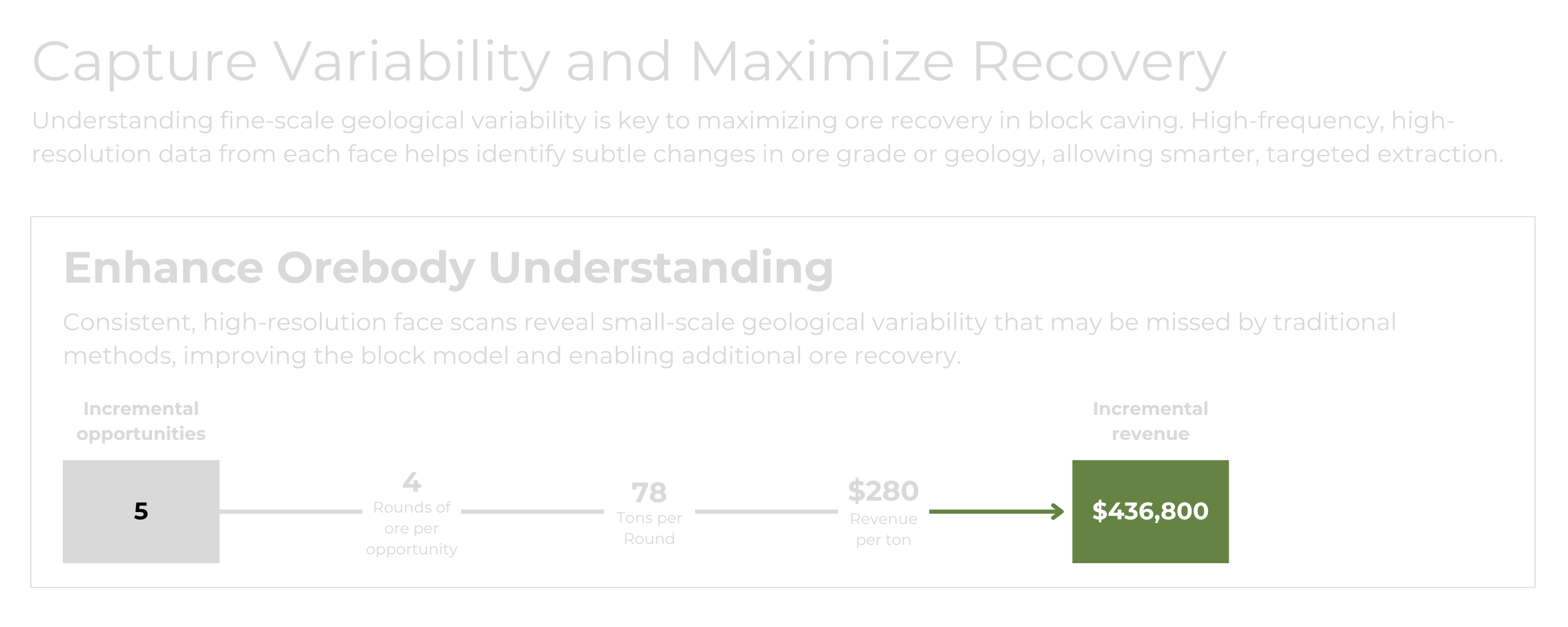
MVS has a direct impact on optimizing drill & blast patterns, reducing overbreak and underbreak, increasing precision and frequency of production metrics reporting, and improving public resource forecasting.
We get interest from executive leadership, corporate innovation teams, mine management, geologists, mining engineers, and surveyors. Our technology and mission have a positive impact on each of these functions.
Currently the most significant competitive risk to a “yes” decision to lease FaceCapture is status quo. The lowest risk decision for many when faced with putting their reputation on the line with new technology is to do nothing. This is the case for any transformational technology.
We are able to train a FaceCapture user within 2 hours. Our onboarding process involves a technical services expert onsite for a week to 1) train users, 2) learn about the unique workflows currently at the mine, and 3) work with the customer on a to-be process that allows for quick early success. Change management with transformational technologies is an essential component of successful adoption, and we partner with customers to ensure maximum impact of the technology.
MVS’s technology stack is built for real-time data visualization, seamless integration of LiDAR and image data, and efficient georeferencing to deliver actionable insights.
Front End: Browser application for real-time data visualization and automated process management.
Back End: High-performance system leveraging ROS, Python, and C++, with a PostgreSQL database, RESTful API and a Linux-based operating system.
Hardware: A modular approach featuring NVIDIA computing hardware and sensory components from Ouster and Allied Vision, designed for high-quality spatial and image data collection in 3D mine modeling.
We have obtained approval for a patent covering our ability to georeference in GPS-denied environments and are actively working on a strategy for continuations. The patent application that has been approved is U.S. Patent Application No. US17/653,866 (““System And Method For Collecting And Georeferencing 3D Geometric Data Associated With A GPS-Denied Environment”). The patent covers a workflow that includes 1) creation of 3D models of underground mines where GPS can't be used, 2) combining data from distance-measuring sensors (LiDAR) and cameras to build a model, 3) accurately positioning the model in real-world coordinates, using identifiable markers (called "survey control points") found in the images, 4) identifying geological features found in the images and mapping them in 3D, and 5) continuously updating the 3D model with new data from the sensors and cameras.
MVS is expanding its capabilities to enable scalable, autonomous, and predictive mining solutions through:
Cloud-Based Data Management – Expanding data accessibility across a broader customer base.
Georeconciliation – Enhancing georeferencing capabilities for improved positioning of LiDAR and image data.
Volumetrics & Reporting – Transitioning from monthly to daily mine production metrics for better predictability.
Predictive AI-Based Insights – Leveraging newly collected data for AI-driven decision-making, resource optimization, and autonomy.
Vehicle Mount & Remote Autonomy – Enabling passive, autonomous data collection for remote mining operations.
Our roadmap positions us to lead in AI-driven, cloud-enabled, and autonomous mining technology.
Current LIDAR scanning technologies are mostly used for one-off inspections due to heavy post-processing requirements and their inherent disruption to current processes. Technology adoption is limited when it is slow and produces incomplete information. These are problems that do not exist with MVS. MVS has introduced novel capabilities that include the ability to 1) georeference and localize in real time and 2) to fuse location, image and spatial data in real time. Some current LIDAR scanners are exceptional at producing highly accurate one-off mine maps to which MVS can localize when the requirement shifts from inspection to production. In this regard, many current LIDAR scanning companies are potential MVS partners.
Not currently. Utilizing a drone-based delivery system would limit our applications underground, although we may decide to add this capability in the future. Currently drone-based LIDAR scanners are prospective partners to MVS. Nearly all drone-based applications in underground mining are for periodic inspections, whereas our focus is on providing solutions for continuous production requirements. Our initial offering of handheld is a choice, driven by our customers, to address specific needs in a day-to-day production environment in a mine heading. We are agnostic to the delivery mechanism, however, and there are no limitations to using new delivery mechanisms for our system if the market opportunity is attractive. The next phase for the product is currently targeted for equipment mount, from which a direct line to remote and autonomous monitoring will be drawn.
MVS was founded out of the National Robotics Engineering Center (NREC) and Carnegie Mellon University (CMU) in 2015. The core technology leading to the company’s founding was developed by NREC through funding from mining industry leader Gold Fields beginning in 2007. Beginning in 2007-2012 Goldfields spent ~$12M on the development of an articulated underground mining robot that included an advanced SLAM based vision system for teleoperation in deep underground mines. In the words of an early Gold Fields sponsor, “The breakthrough and first glimpses of what MVS would become came in 2010 when working on a computer vision program to set up fiduciary points for survey so the robot could navigate. We discovered that the computer vision was able to navigate in its 3D environment without survey support.” This was a breakthrough. As the business case for the mining robot diminished, the business case for computer vision in mining increased. MVS was formed in 2015 with initial funding from Gold Fields to commercialize its novel computer vision technology in underground mining.
Ready to get started?
Let's connect and discuss how Mine Vision Systems can dramatically improve your underground mapping workflows.